MPU-6050 bilan ishlashni optimallashtirish: sozlash, kalibrlash va dasturlar
2024-04-25
9222
Mpu-6050 Dunyoning birinchi birinchi birinchi birinchi 6 o'qi harakatlanuvchi tarkibiy qismidir, bu 3 o'q giropopi, 3 o'qi akseleri va mas'ul raqamli harakat protsessorini (DMP) birlashtiradi.Ushbu ob'ektning xra, y va z o'qlari kabi ob'ektning moyil burchagini (masalan, o'lchagich, burchak burchagi, burchak va yaw burchagi (masalan, burchakli burchakli burchakni olishdir.Biz MPU-6050 (uchta o'qni tezlashtirish bo'yicha reklama tezligi va uch-o'qi burchakli tezlik reklamasi) i2C interfeysi orqali o'qiymiz.Formozni qayta ishlashdan keyin, maydon, rulon va ya'ni burchaklar hisoblash mumkin.O'lchov qiymatlari uchun yo'naltirilganlik ma'lumotlari sifatida sensdor koordinata yo'nalishini aniqlash quyidagicha ko'rsatilganidek, quyida muvofiq koordinata tizimining printsipiga amal qiladi (ya'ni o'ng bosh barmog'i X-ning ijobiy tomonga yo'naltirilgan.O'q, indeks barmog'i y o'qining ijobiy yo'nalishi va o'rta barmoq Z-o'qning ijobiy tomonga yo'naltirilgan. Yo'nalish.
Katalog

I2C sensor avtobusi bilan MPU-6050 to'liq 9 o'qi motionfusion ™ chiqishini ta'minlaydigan tashqi 3 o'q kompasidan kirishga qodir.Bu birlashtirilgan giroskop va tezlatgich vaqt jadvalining nomuvofiqligi muammosini yo'q qiladi va ko'p komponent echimlariga nisbatan qadoqlash joyini sezilarli darajada kamaytiradi.Uch-o'q magnitometrga ulanganda, MPU-60x0 9 o'qi harakatlanishini asosiy I2C yoki SPI portiga to'liq berishga qodir (E'tibor bering, SPI-6000-da mavjud bo'lgan xabarda).
Alternativa va ekvivalentlar
- MPU-3300
- Mpu-6000
- Mpu-6500
MPU-6050 ishlab chiqaruvchisi
MPU-6050 ishlab chiqaruvchisi TDK.TDKning ikki asoschisi doktor Yogoro Kato va Tokioda Kartitni ixtiro qildi Tokio Denkagagki KOGOKU KOG.1935 yilda Global Electronics brend sifatida, TDK har doim elektron xom ashyo va elektron komponentlar sohalarida dominant mavqega ega.TDKning keng qamrovli va innovatsion mahsulotlari portfeli, keramik konstantorlar, alyuminiy elektrotsitlar, yuqori chastotali buyumlar, piezoelektrik va iztirobli asboblar, shuningdek dazmoliya va sensorlar kabi passiv komponentlarni qoplaydiMagnit va mems sensorlari va boshqalar. Bundan tashqari, TDK elektr ta'minoti va energetika qurilmalarini, magnit bosh va boshqa mahsulotlarni ham ta'minlaydi.Uning mahsulot brendlari tarkibiga TDK, EPCOS, EPCOS, ITHOLRAS, TRONIKA VA TDK-LAMBDA kiradi.
MPU-6050 ichki blok diagrammasi
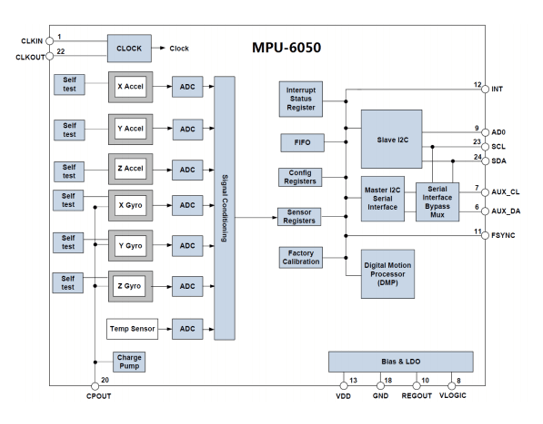
Ular orasida SCL va SDA MCU bilan bog'liq IIC interfeyslari, MCU MTU-6050 ushbu iIC interfeys orqali MPU-6050 ni boshqaradi.Shuningdek, iik interfeysi mavjud, ya'ni AX_CL va AUX_DA.Ushbu interfeysdan tashqi o'q varaqasini tashkil etish uchun tashqi qulli qurilmalarni ulash uchun ishlatilishi mumkin.Vlogic - bu iO kuchlanishi.Ushbu pin kamida 1,8V ni qo'llab-quvvatlashi mumkin.Biz odatda uni to'g'ridan-to'g'ri VDD-ga ulaymiz.Ad0 - bu xizmatkorning AIC interfeysi (MCUga ulangan).Ushbu pin iC manzilining eng past bitini boshqaradi.Agar GND-ga ulangan bo'lsa, MPU-6050 ning iIC manzili 0x68;Agar u VDD ga ulangan bo'lsa, u 0x69.E'tibor bering, bu erda manzil ma'lumot uzatishning eng past bitini o'z ichiga olmaydi (eng past bit o'qish va yozish operatsiyalarini taqdim etish uchun ishlatiladi).MWBRADEDSTC15-da Ad0 GND ga ulangan, shuning uchun MPU-6050 ning iic Ma'muriyati 0x68 (eng past bitdan tashqari).
IIC interfeysini ishga tushiring
MPU-6050 STC15 bilan muloqot qilish uchun iC-dan foydalanadi, shuning uchun avval MPU-6050 bilan bog'langan SDA va STL ma'lumotlarini boshlashimiz kerak.
MPU-6050-ni tiklash
Ushbu qadam MPU-6050 raqamini ularning standart qiymatlariga qaytarish, bu esa elektr energiyasini boshqarish ro'yxatiga 1-chi Bit7-ni 1-Bit7-ni 1-Bit7 ni yozish orqali amalga oshiradi (0x6b).Qayta tiklashdan keyin elektr energiyasini boshqarish ro'yxatiga kiritiladi (0x40) va keyinchalik MPU-6050ni uyg'onish uchun 0x00 ga o'rnatiladi va uni normal ish holatiga joylashtiradi.
Burchak tezligining to'liq doirasini (GYRO) va tezlashtirish sensorini o'rnating
Ushbu qadamda biz ikki sensorning to'liq miqyosidagi (0x1b) va mos ravishda tezlashtirish sensori konfiguratsiya registratsiyasi (0x1c) orqali biz ikki datchochka (0x1b).Odatda, biz giroskopning to'liq hajmini ± 2000 yoki undan katta turdagi akselerometrning ± 2g gacha o'rnatamiz.
Boshqa parametrlarni o'rnating
Bu erda biz quyidagi parametrlarni sozlashimiz kerak: AUX I2C interfeysini o'chirib qo'ying, FIFOni o'chiring, gishoskopni o'chirib qo'ying, gishoskopni tanlab oling va raqamli past piltrni (DLPF) sozlang.Ushbu bobda ma'lumotlarni o'qishga xalaqit beradigan uzilishlardan foydalanmaymiz, to'xtatilish funktsiyasi o'chirilishi kerak.Shu bilan birga, biz boshqa tashqi sensorlarni ulash uchun AUX I2C interfeysidan foydalanmaymiz, shuningdek, ushbu interfeysni yopib qo'yishimiz kerak.Ushbu funktsiyalarni to'xtatish orqali boshqarilishi mumkin (0x38) va foydalanuvchi nazorati registri (0x6a).MPU-6050 dersor ma'lumotlarini saqlash uchun FIFO-dan foydalanishi mumkin, ammo biz ushbu bobda biz undan foydalanmadik, shuning uchun barcha FIFO kanallari yopilishi kerak.Buni FIFO ro'yxatdan o'tkazilishi mumkin (0x23).Odatiy bo'lib, ushbu reestrning qiymati 0 (ya'ni, FIFO o'chirilgan), shuning uchun biz to'g'ridan-to'g'ri standart qiymatdan foydalanishimiz mumkin.Giroskopning tanlab olish darajasi namuna olish darajasi Distering Registr (0x19) tomonidan boshqariladi.Odatda, biz ushbu tanlab olish darajasini 50 ga o'rnatdik. Raqamli kamdan-kam filtr (DLPF) konfiguratsiyasi konfiguratsiya registratsiyasi orqali yakunlanadi (0x1a).Umuman olganda, biz DLPF-ni tarmoqlarning aniqligi va javob tezligini muvozanatlash uchun "Chiroyli" ning yarmiga o'rnatamiz.
Tizimni sozlash manbaini sozlang va burchak tezligi sensori va tezlashuv sensoriga yoqing
Tizim soatlari manbai sozlamalari 1 (0x6b), bu erda ushbu reestrning eng past uchta biti soat manbasini tanlashini aniqlaydi.Odatiy bo'lib, ushbu uchta bit 0 ga o'rnatiladi, bu esa tizimning ichki 8mhz rc osicatorni soat manbai sifatida ishlatadi.Biroq, soat aniqligini oshirish maqsadida biz tez-tez 1 ga o'rnatamiz va soat mansabli rll sifatida X-o'q gyroskope-ni tanlaymiz.Bundan tashqari, burchak tezligi sensori va tezlashuv sensorini yoqish, shuningdek, initsializatsiya jarayonida muhim qadamdir.Ikkala operatsiya ham elektr energiyasini boshqarish ro'yxatiga (0x6C) amalga oshiriladi.Tegishli sensorni faollashtirish uchun shunchaki mos keladigan bitni 0 ga o'rnating.Yuqoridagi bosqichlarni tugatgandan so'ng, MPU-6050 normal ish holatini kiritishi mumkin.Maxsus to'plam bo'lmagan ro'yxatdan o'tganlar standart qiymatlarni tizim tomonidan oldindan belgilab beradi.
MPU-6050 qanday ishlaydi?
Gyro sensor
Sensor ichkarida gyro bilan jihozlangan, bu esa har doim gyoskopik ta'sir tufayli boshlang'ich yo'nalish uchun parallel ravishda qoladi.Shuning uchun, gero boshlang'ich yo'nalishdan gero ning og'ishini aniqlash orqali aylanish yo'nalishi va burchagini hisoblashimiz mumkin.
Akselerometr sensori
Tuzatiluvchan sensor - bu tezlashishni o'lchash va u piezoelektrik effekti asosida ishlaydi.Tezlashtirish paytida sensor ommaviy blokka qo'llaniladigan inervital kuchni o'lchaydi va Nyutonning ikkinchi qonunidan foydalanib tezlashtirish qiymatini hisoblab chiqadi.
Raqamli motion protsessori (DMP)
Gyroskop va akseler sensorlaridan ma'lumot olish va mahsulotni qayta ishlash uchun Kalman filtrlash algoritmi bo'lgan MPU6050 chipida DMP ma'lumotni qayta ishlash moduli.Ushbu xususiyat periferik mikroprotsessorning ish yukini sezilarli darajada kamaytiradi va charchagan filtrlash va ma'lumotlarni teri jarayoni oldini oladi.
Izohlar:
Kvasarlar: Kvasarlar oddiy superkleks sonlardir.Kompleks raqamlar haqiqiy raqamlardan iborat bo'lib, i ^ 2 = -1.
MPU-6050 qayerda ishlatiladi?
- O'yinchoqlar
- telefon va ko'chma o'yin
- Harakatga asoslangan o'yin nazoratchilari
- Blurfree ™ texnologiyasi (video / hali ham barqarorlashtirish uchun)
- Airsign ™ texnologiyasi (xavfsizlik / autentifikatsiya uchun)
- IG ™ imo-ishorasini instantsiya
- sog'liqni saqlash, fitnes va sport uchun charchagan sensorlar
- Motion-yoqilgan o'yin va dastur doirasi
- MotionCommand ™ texnologiyasi (imo-ishorasi uchun qisqartirish uchun)
- Joylashuvga asoslangan xizmatlar, foizlar va o'lik hisob-kitob
- Internetga ulangan Internet-ulanish uchun masofadan boshqarish vositalari va Top qutilarni o'rnating, 3D sichqonlar
- Truananane ™ texnologiyasi ("yo'q teginish" UI dasturini boshqarish / Navigatsiya)
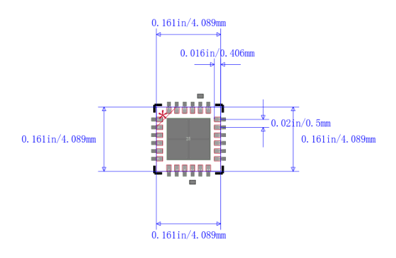
MPU-6050 paketi
MPU-6050 shovqini qanday kamaytirish mumkin?
MPU-6050 shovqinini kamaytirish uchun biz quyidagi usullarni qabul qilishimiz mumkin.
Kalibrlangan sensorlardan foydalaning
MPU-6050 ning akselerometr va gyoskoperni kalibrlash datchiklarining o'zlarini va xatolarni yo'q qilishi mumkin, shuning uchun shovqinning ta'sirini kamaytiradi.Kalibrlash jarayoni odatda ikki bosqichdan iborat: statik kalibrlash va harakatni kalibrlash.
Uskuna filtrlash jarayoni
MPU-6050 quvvat chizig'iga filtr mahsulotlarini qo'shish quvvat manbai shovqinini sensorda kamaytirishi mumkin.Shu bilan birga, PCBni tuzish paytida biz MPU-6050 masofani bosib o'tishning potentsial aralashuvi va yuqori kuchli qismlar kabi aralashuvlardan uzoqroq foydalanishga harakat qilishimiz kerak.
Dasturiy filtrlashni qayta ishlash
MPU-6050 dan xom ma'lumotlarni yig'ib olgandan so'ng, biz shovqinli aralashuvni yo'q qilish uchun dastlabki ma'lumotlarni qayta ishlash uchun dasturiy fayllarni filtrlash havzasini qo'shamiz.Ko'p ishlatiladigan dasturiy ta'minotni filtrlash usullari o'rtacha filtrlash, O'rta filtrlash, kalman filtrlash va boshqalar.
Ichki pasdali filtrdan foydalaning
MPU-6050 ichki integratsiyalashgan raqamli pog'onaga ega bo'lgan ichki integratsiyalangan filtrga ega, ularni kesish chastotasini o'rnatib, yuqori chastotali shovqinni kamaytirish uchun ishlatilishi mumkin.Xususan, biz raqamli filtrning kesish davrini belgilashimiz mumkin.
MPU-6050 asosidagi kinotulyatsiyasini hisoblash
MPU-6050 - bu ob'ektlarning harakati va munosabatini o'lchash uchun ishlatilishi mumkin bo'lgan oltita o'q moslamasi va gyroskop datchisi.MPU-6050 asosida hisobni hisoblash quyidagi bosqichlar bilan amalga oshirilishi mumkin:
Birinchi qadam sensor ma'lumotlarini o'qish.Biz tegishli drayverlar va kutubxona funktsiyalaridan foydalangan holda MPU-6050 datchissining akselerometr va gyroskop ma'lumotlarini o'qishimiz kerak.Ushbu ma'lumotlar odatda raqamli formatda chiqadi, shuning uchun ularni jismoniy bo'linmalarda haqiqiy o'lchovlarga o'tkazish uchun ba'zi konversiya va kalibrlash ishlari talab qilinadi.
Ikkinchi bosqich - tezlashishni hisoblash.Birinchidan, har bir o'qda ob'ektni tezlashtirishni aniqlash uchun biz akselerometrdan ma'lumotlarni qayta ishlashimiz kerak.Keyinchalik ob'ektning har bir o'qda tezligini va siljishini hisoblash uchun, biz tezkor ma'lumotlarni birlashtirishimiz kerak.Elerning usuli yoki Lunger-Kutta usuli kabi raqamli integratsiya texnikasi, bu jarayonda boshqa joyga ko'chirish hisob-kitoblarining aniqligini ta'minlash uchun ishlatiladi.
Uchinchi bosqich - burchak tezligini hisoblash.Gyroskop ma'lumotlaridan foydalanish, har bir o'qda ob'ektning burchak tezligi hisoblab chiqilishi mumkin.Shunga qaramay, bu ma'lumotlar haqiqiy jismoniy bo'linmadagi burchak tezligini olish uchun kalibrlash va aylantirilishi kerak.
To'rtinchi qadam - bu aylanishni hisoblash.Buruariy tezlik ma'lumotlarini birlashtirish orqali har bir o'qda ob'ektni aylantirish burchagi hisoblash mumkin.Buni allerning usuli yoki burchakni hisoblash uchun Loneg-Kuttta usuli kabi raqamli integratsiya usullari yordamida amalga oshirilishi mumkin.
Beshinchi qadam bu ma'lumotlarni birlashtirish.Biz ob'ektning to'liq munosabati va pozitsiyasini olish uchun biz tezkorerometrlar va giroskoplardan ma'lumotlarni birlashtiramiz.Buni Quakerlik (qiyofa kasbori yoki EULER burchagi kabi algoritmlar yordamida amalga oshirish mumkin.
Oltinchi bosqich - natijalarni tasavvur qilish.Biz hisoblangan Ob'ekt harakati traektoriyasini 3D koordinata tizimiga aylantiramiz va uni tegishli vizualizatsiya vositalarida ob'ektning harakati traektoriyasi va munosabat o'zgarishi uchun tegishli vizualizatsiya vositalaridan foydalangan holda namoyish etamiz.
Tez-tez beriladigan savollar [FAQ]
1. MPU6050 qanchalik aniq?
Olingan natijalar 1%%%% va ishonchlilikni, lift va lift sanoatining yuqori standartlarini to'g'ri yo'nalishini ta'minladi.
2. MPU6050-dan ma'lumotlarni qanday o'qish kerak?
MPU6050 registrlarini o'qish uchun usta boshlang'ich holatini, undan keyin I2C qul manzili va yozilishi kerak bo'lgan registr manzilini yuboradi.
3. MPU6050 qayerda ishlatiladi?
Kiyimlarni kuzatish, fitness-kuzatuv moslamalarida.Droylarda va to'rtburchaklarda MPU6050 pozitsiyani boshqarish uchun ishlatiladi.Robot qo'lini boshqarishda ishlatiladi.Qo'l imo-ishorasini boshqarish moslamalari.
4. MPU6050 O'IMmi?
MPU6050 O'IH sensor bloki apparatka ulangan MPU-6050 sensori ma'lumotlarini o'qiydi.Blok mahsulotlarini tezlashtirish, burchak darajasi va sensor o'qlari bo'ylab harorat.
5. MPU6050 ni qayta ishlash qanday?
Bu MPU6050-ning dogolerometrdan kelib chiqadigan ma'lumotlarni birlashtiradigan va giroskope-da birlashtiradi.DMP MPU6050-dan foydalanishning kalitidir va keyinroq batafsil bayon qilingan.Barcha mikroprotsessorlar bilan bo'lgani kabi, DMP yugurish uchun DMP dasturiy ta'minotga muhtoj.
funktsiya sinov.Eng yuqori iqtisodiy samarali mahsulotlar va eng yaxshi xizmat - bu bizning abadiy sadoqatimiz.
Issiq maqola
- CR2032 va CR2016-sonli
- Mosfet: ta'rifi, ish printsipi va tanlov
- Etaish va sinovdan o'tish, o'rni simlari diagrammalarini sharhlash
- CAQ2016 va CR2032 Farqi nima
- NPN va PNP: farq nima?
- ESP32 vs STM32: qaysi mikrokontroller siz uchun yaxshiroqmi?
- LM358 Dual operatsion kuchaytiruvchi keng qamrovli qo'llanma: Pinopol, tuman diagrammalari, ekvivalentlar, foydali misollar
- CR2032 vs dl2032 vs CR2025 Taqqoslash qo'llanmasi
- ISP32 va ESP32-S3 farqlarini tushunish
- RC seriyasining batafsil tahlili
 NRF24L01 aloqa chipining imkoniyatlari va dasturlarini o'rganish
NRF24L01 aloqa chipining imkoniyatlari va dasturlarini o'rganish
2024-04-25
 Mmbt3904 NPN Transtistor: uning xususiyatlari, keng qamrovli qo'llanma, MMBT3904 va MMBT5551
Mmbt3904 NPN Transtistor: uning xususiyatlari, keng qamrovli qo'llanma, MMBT3904 va MMBT5551
2024-04-25
Issiq qism raqami
 EMVY100ADA101MF55G
EMVY100ADA101MF55G 06033C103MAT2A
06033C103MAT2A- 06031C392JAT2A
 08055A510JAJ2A
08055A510JAJ2A CGA5L2X8R2A154K160AD
CGA5L2X8R2A154K160AD GRM1556R1H240GZ01D
GRM1556R1H240GZ01D- GRM1556R1H7R5DZ01D
 TAP335K035SRW
TAP335K035SRW MUSES72320V-TE2
MUSES72320V-TE2 PIC32MM0064GPL020-I/SS
PIC32MM0064GPL020-I/SS
- ERJ-6ENF1582V
- ENC28J60-I/SP
- PM15CTM060
- V48C12H150AL3
- LM2575S-5.0
- HMC336MS8GE
- AD7245AAN
- LT3680IMSE#TRPBF
- TLV2324IDR
- LP38690DT-3.3/NOPB
- TLK10022CTR
- NCP715SQ50T2G
- ADL5801ACPZ
- AM26C32DBR
- BT68561AKPJ
- CD4052BF3A
- DS1867S-050+TR
- ICS671GI-16LFT
- IRMCK201
- M36L0R8060T1ZAQE
- MB91696BJ
- PAL16L8-7JC
- RF3000TR13
- UPD703003AGC-33-209-8EU
- KTC3880-Y-RTK/P
- TDA8920CTH
- LF11333D
- AF3373-LC1
- HD6432199FV
- IDTQS34XVH245Q3G
- MT5501ESNU
- BU9768AK
- GS8120-174-008DB0
- ISO1042BDWR
- V300B28C250AN3
- VI24C5M100AL
- C0803C472K5RAC
- RP506L001N-Y
- SN105070EZPNPR